 |
|||||
 |
|||||
  |
|||||
| 2019.09.16 Open | |||||
偏光フィルタターレット駆動用ステッピングモータの制御 |
|||||
| 偏光フィルターのターレットはステッピングモーターで直接駆動するが、そのまま急停止すると大きなブレが出る。そこで台形制御をするとよいというアドバイスを某所より頂いた。また、モータードライバーを使うと楽に制御ができるとも教わったのだが、素人では何とも…と思って居た。 先ず、台形制御について調べてみると、モーターの回転速度を徐々に加速させ、最高速を保って目的のところ付近まで回転させ、徐々に減速して止める、というモノであると判明。 次にステッピングモータードライバとは?と調べて行って見ると、PICやArduinoから1本の線でパルスを受けて4本線のバイポーラ・ステッピングモーターを駆動する代物、という事が判った。で、Amazonで検索したらこんなものが引っ掛かった。 という事で、ここでの課題は、 1.台形制御に必要な徐々にパルス幅(或いは周波数?)を可変するPIC用のファームウェアを作る 2.その信号を受けたモータードライバが対応した速度でステッピングモーターを回す回路を作る の2点になると考えた。 |
|||||
1.台形制御のファームウェア製作 |
|||||
| ファームウェアは等比数列になっていると良いのか?と考え、ファームウェアの製作を開始したけれど、全くうまく行かない。そこで色々なHPやらブログを探って行ったら、8bitのPICでは浮動小数点計算は出来ないと考えた方がイイ(不可能ではないがメモリをやたら食うらしい)。また、__delay_us(x) を使う場合、xには変数を入れられない、という事を今更ながら知った。というか2013年にPICを使いだしてから、知るのに6年もかかっていたというこの衝撃!であった。また、XC8のpic.hの中身をチョイと変更もしなくてはいけない、との事。148行目を #ifdef __PICC__ にするのだそうだ。加えて書き込みが出来ないフォルダ&ファイルなので、プロパティを見てフルコントロールが効くように変更する必要があった。 そんなこんなで取り敢えず1/4回転したら停止、1秒ほど待って、また1/4回転する、を延々繰り返すファームウェアを作りました。 これにシャッターを切るルーチンを加えると完成、の筈、ですが… 偏光撮像用のオリンパスE-M10 mkIIのシャッター速度は1/60秒でHDRモードの2EV間隔7段にする。1~1/4000秒で撮像されるので、3秒シャッターを切る設定にする。 回転速度と加減速の具合、シャッターを切り続ける時間などはチューニングしていく必要があります。 ◆ファームウェアのプログラムリストはページの一番下 ◆ダウンロード…その1. |
|||||
 PICの出力パルス 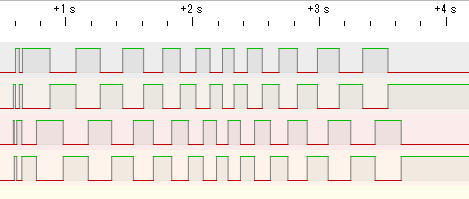 ドライバの出力 |
|||||
2.ステッピングモーターを駆動するための回路の製作 |
|||||
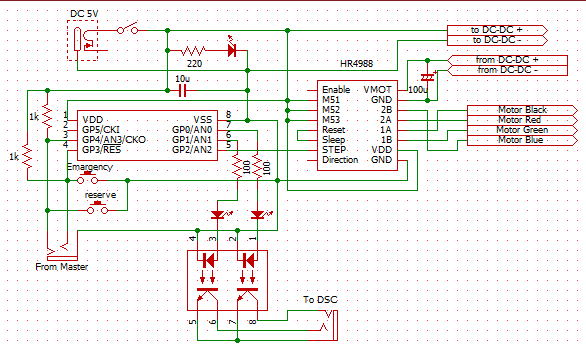 回路図 |
|||||
|
|||||
1 /* 2 * File: main.c 3 * Author: M_shi 4 * 5 * Created on 2019/08/24, 20:18 6 */ 7 8 #include <pic.h> 9 #include <xc.h> 10 #include <stdlib.h> 11 #include <stdio.h> 12 //#include <math.h> 13 //#include <delays.h> 14 15 16 #pragma config WDTE = OFF 17 #pragma config PWRTE = ON 18 #pragma config MCLRE = OFF 19 #pragma config CP = OFF 20 #pragma config CPD = OFF 21 #pragma config BOREN = OFF 22 #pragma config IESO = OFF 23 #pragma config FCMEN = OFF 24 //#pragma config FOSC = HS 25 #pragma config FOSC = INTOSCIO 26 #define _XTAL_FREQ 4000000 27 //#define __delay_ms(x) _delay((unsigned long)((x)*(_XTAL_FREQ/400UL))) 28 29 30 31 32 void main(void) { 33 34 static int i, j, k, t; 35 36 TRISIO = 0b00001000; 37 ANSEL = 0b01100000; 38 WPU = 0b00001100; 39 CMCON0 = 0x07; 40 41 for(i = 20; i>= 1; i-=1) 42 { 43 GP2 = 1; 44 for(j=0; j<i; j++){ 45 __delay_us(1500); 46 } 47 __delay_ms(20); 48 GP2 = 0; 49 for(j=0; j<i; j++){ 50 __delay_us(1500); 51 } 52 __delay_ms(20); 53 } 54 55 for(i = 20; i>= 1; i-=1) 56 { 57 GP2 = 1; 58 for(j=0; j<20-i; j++){ 59 __delay_us(1500); 60 } 61 __delay_ms(20); 62 GP2 = 0; 63 for(j=0; j<20-i; j++){ 64 __delay_us(1500); 65 } 66 __delay_ms(20); 67 } 68 __delay_ms(500); 69 70 71 72 return; 73 } |
|||||
